了解 Remcom 的WaveFarer® 雷达仿真软件如何使用光线追踪技术模拟虚拟驾驶场景,并预测系统在车辆、道路结构、行人和其他物体环境中移动时的雷达回波。
驾驶场景模拟可为传感器设计的早期测试提供显著优势,并可作为实际道路测试的补充。然而,以毫米波雷达传感器为重点,现实汽车场景模拟面临着一些挑战:
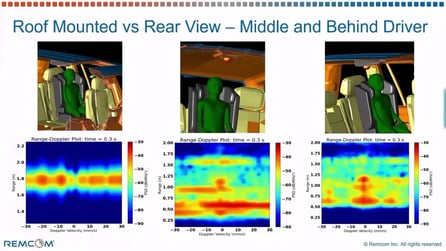
本讲座使用 WaveFarer 来描述这些挑战、可能的解决方案以及最近为解决该问题的关键方面而进行的研发,包括目标散射、多径和杂波,以及来自运动(如步行者移动的四肢)的微多普勒。
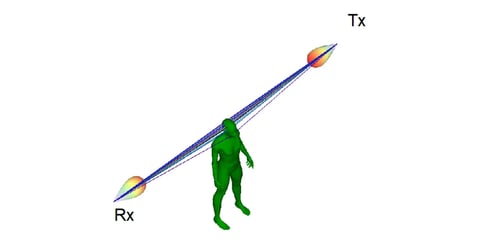
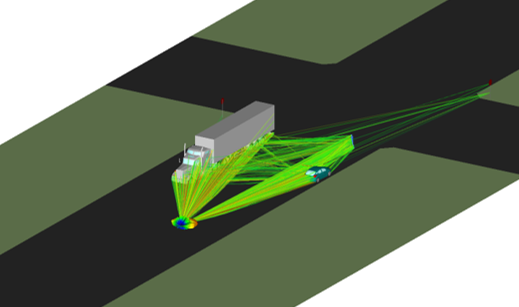
仅 PO 散射和 UTD 交互作用
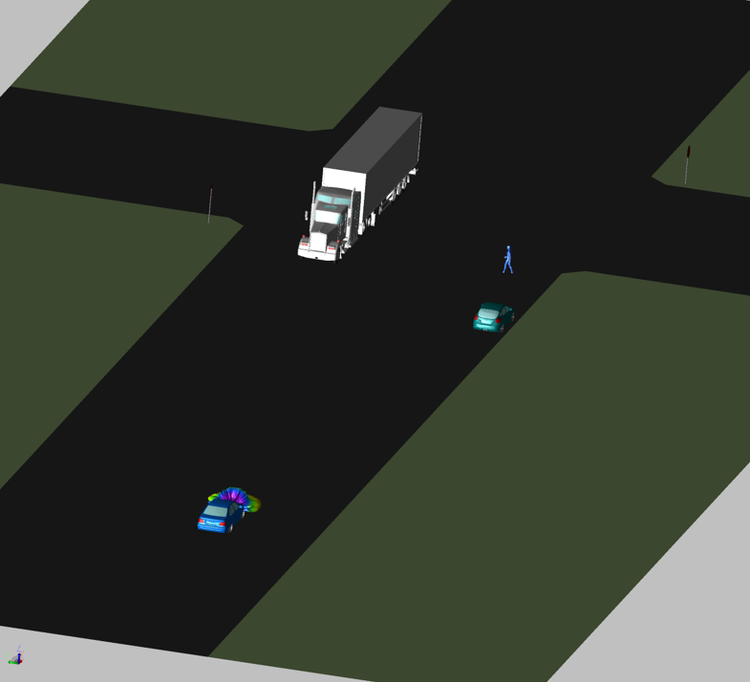
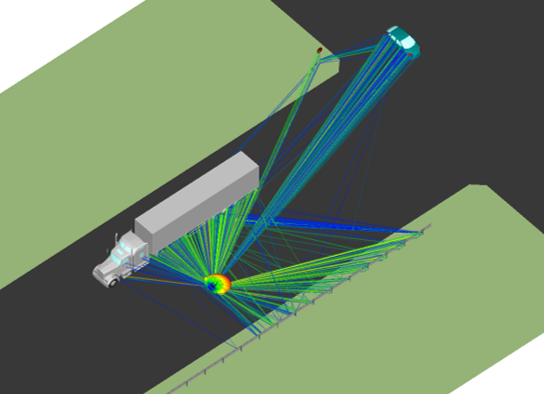
行人在雷达主机车辆接近时横穿马路。
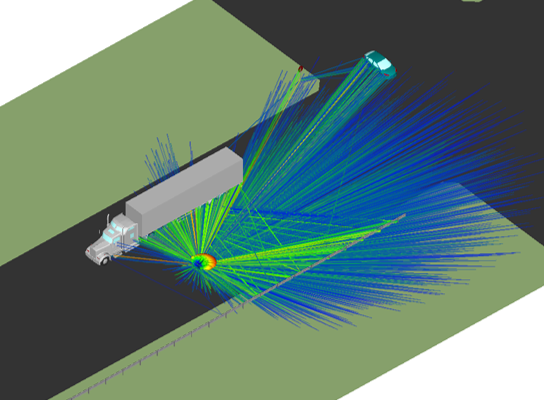
带漫反射
主导路径显示了与车辆、行人和停车标志的互动。