本例是XFdtd计算合成孔径雷达和阻抗的验证练习,最初由爱立信无线电系统人员在 20 世纪 90 年代末使用更早的软件版本[1]完成。在此使用 XFdtd 重复这一过程,并做了一些修改,包括在偶极子上使用XACT Accurate Cell Technology®网格。
其几何结构包括一个充满液体的球形碗,碗的正下方有一个偶极子天线,碗的一侧有一个偏移。图 1 显示了偶极子中心间隔(参数 "h")为 5 毫米时的配置。模拟在 835 MHz 频率下进行,偶极子与碗的间距从 5 毫米增加到 50 毫米,观察其对 SAR 和阻抗的影响。图 2 还模拟了偶极子偏移的次要位置,使偶极子的一端位于碗的正下方。
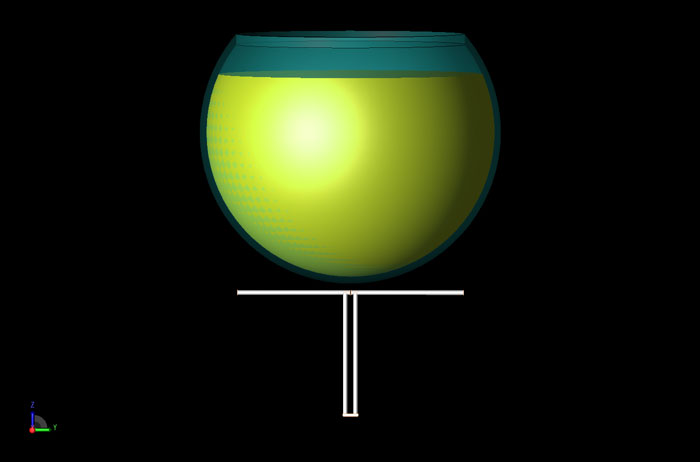
图 1:CAD 绘制的几何图形,偶极子位于中心位置,间距设定为 5 毫米。
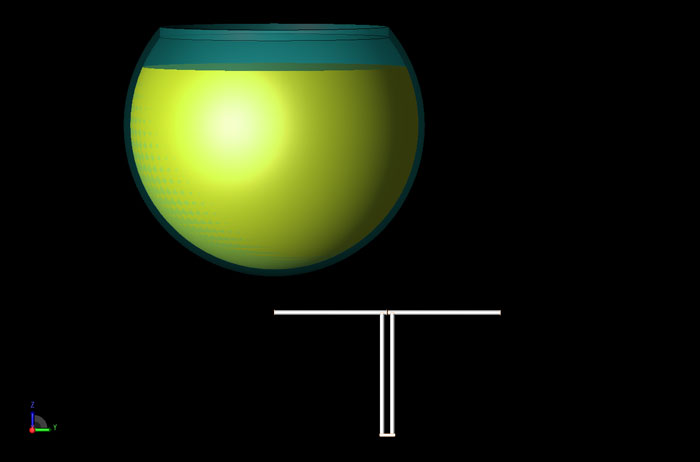
图 2:CAD 绘制的几何图形,偶极子偏移到右侧,间隔距离设定为 25 毫米。
该天线使用 XACT 功能进行网格划分,完全符合几何形状。图 3 显示了天线馈线的详细视图,其中突出显示了偶极子臂之间的源激励。几何体的基本网格尺寸为 2.5 毫米,与参考文献中使用的尺寸一致。在本示例中,对网格进行了调整,以迫使一个单元直接位于碗的中心,从而更精确地记录合成孔径雷达。这种网格调整使偶极子的馈电位置略微偏离中心,并对阻抗结果产生轻微影响。请注意,在原始论文中,平衡器并没有包含在模拟中,但在本示例中却包含了平衡器。网格截面图如图 4 所示。
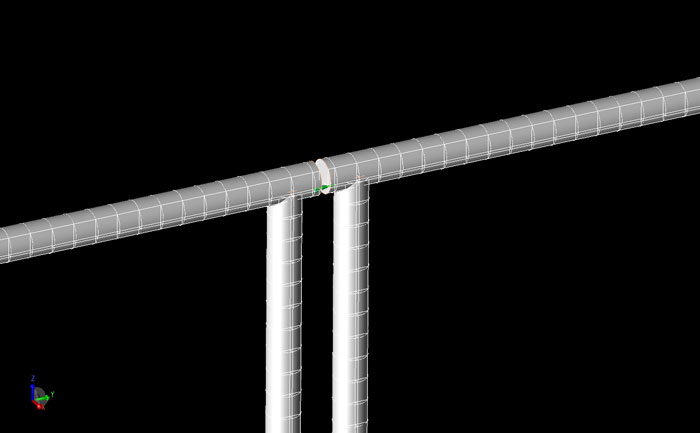
图 3:XACT 网格中偶极子馈电区域的详细视图。
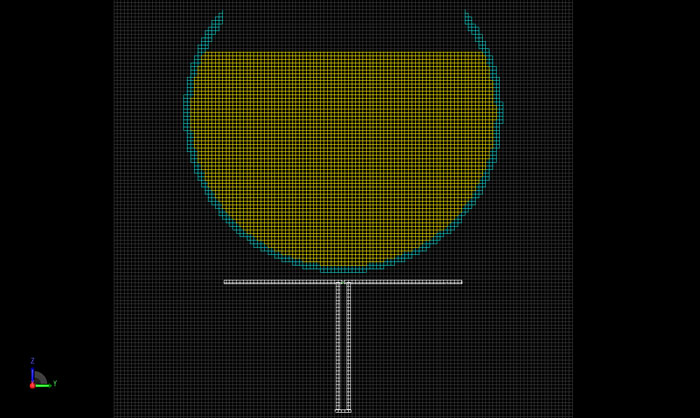
图 4:网格截面图。
在偶极子臂之间施加一个 835 MHz 的正弦信号,然后进行仿真,直到达到稳定状态,场能变化从峰值水平向下小于 -40 dB。模拟在 NVIDIA C1060 Tesla GPU 卡上进行,每个偶极子位置的模拟耗时约一分钟,并取决于偶极子与碗的分离距离。请注意,参考文献中的原始模拟使用的是 20 世纪 90 年代最先进的设备,耗时超过 5 小时。
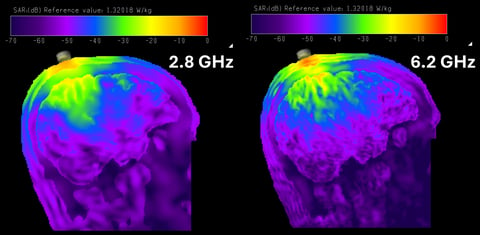
模拟后,偶极子的输入功率进行了调整,使所有结果都能以 1 瓦的功率输送到天线。图 5 显示了偶极子位于碗中心、距离碗底 5 毫米的情况下,通过碗横截面产生的 SAR。从碗中心底部开始向液体表面延伸的合成孔径雷达折线图与测量结果进行了比较,结果显示两者吻合良好。在图 6 中,绘制了天线位于碗底中心的三个偶极子间距的合成孔径雷达与距离的关系图。
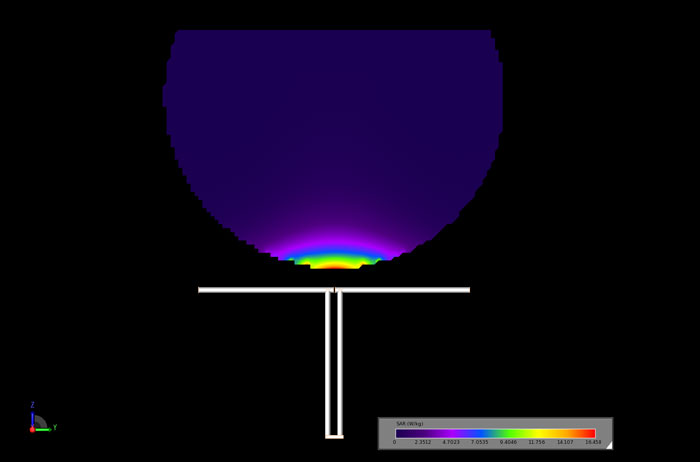
图 5:在偶极子居中、间距为 5 毫米的情况下,通过球体横截面的合成孔径雷达。
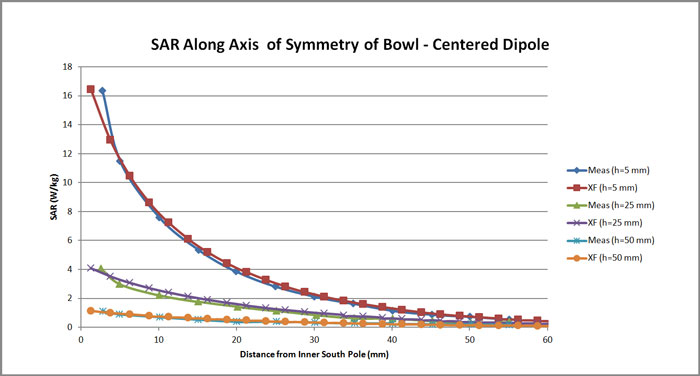
图 6:测量和模拟的合成孔径雷达结果的比较,在偶极子的三个间隔距离内,它是沿球体中心线的距离的函数。
图 7 和图 8 显示了居中偶极子情况下,在碗底上方 30 毫米和 50 毫米处的水平平面上的 SAR 分布情况。如图 7 和图 8 所示,其分布和 SAR 水平与报告中的测量数据十分吻合。

图 7:距离碗底 30 毫米处水平面的合成孔径雷达,偶极子居中,间距为 5 毫米。
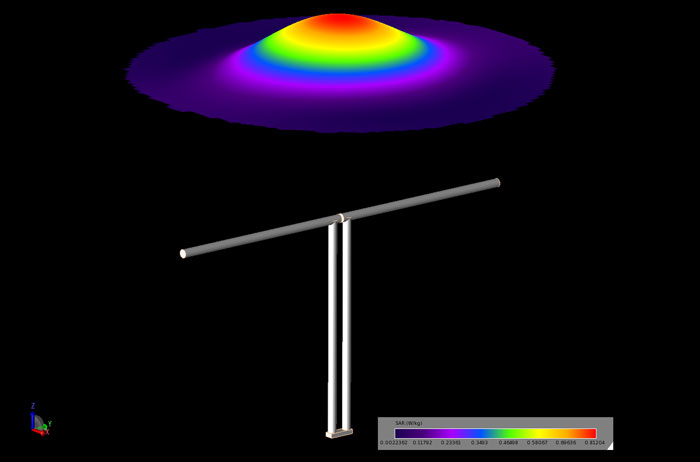
图 8:距离碗底 50 毫米处水平面的合成孔径雷达,偶极子居中,间距为 5 毫米。
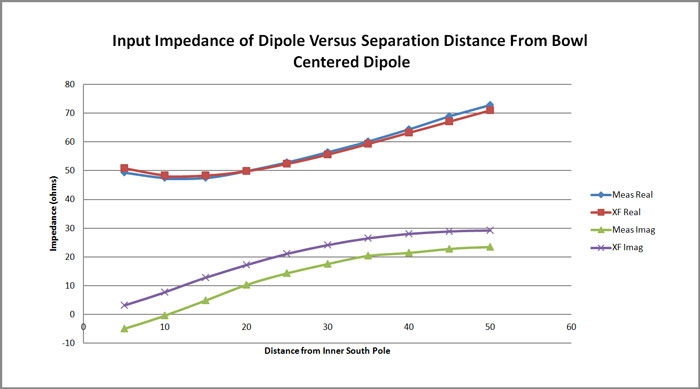
还对不同偶极子位置的阻抗进行了采样。表 1 显示了七个不同测试位置的偶极子阻抗与测量值的比较。图 9 是居中偶极子的阻抗与碗底分离距离的函数关系图。与测量数据的比较结果良好。
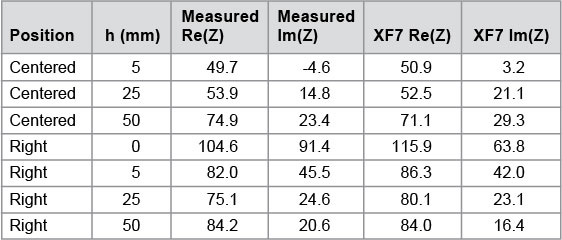
表 1:偶极子相对于碗的几个位置的测量阻抗与模拟阻抗的比较。参数 h 代表与碗底的分离距离。居中位置的偶极子馈电点位于碗的中心下方,而右侧位置的偶极子一端直接位于碗的中心下方。