车际通信(IVC)系统可提供许多潜在的有益服务。想象一下,自适应巡航控制系统可以监测附近车辆的不同速度和位置,自动调整车速,帮助避免碰撞。通过传输实时路况并将驾驶者重新安排到不太繁忙的道路上,可以减少交通拥堵。这些措施甚至可以通过减少总体旅行时间来减少污染。
遗憾的是,稳定的通信链路在设计上面临诸多挑战。IVC 系统要求能够发射和接收全向信号。如果安装位置完美,单根天线就能实现这一目标;但是,车辆的实际安装位置很少。这通常排除了最佳安装位置的可能性,导致了多天线的使用。在这种多输入多输出安排中,设计工程师必须确保完全覆盖。车辆形状和材料成分的影响会影响天线的阻抗和辐射特性,从而使工作变得更加复杂。
外部变量在 IVC 系统的设计中也发挥着作用。这些产品必须在多种环境和操作条件下运行。附近拖拉机拖车的存在可能会反射或阻挡信号。潮湿的路面与干燥的路面对信号场的传播会有所不同,而城市峡谷中的传播会给许多通信系统带来麻烦。
在设计阶段发现并解决这些障碍,可大大减少代价高昂的返工可能性,并显著提高产品成功推出的几率;然而,仅靠测量可能证明是不够的。要获得各种测试车辆可能很困难,甚至不可能。将天线移动到不同的安装位置并进行新的测量非常耗时,而且系统不可能总是在实际运行环境中进行测试。此外,只有在设计和制造完成后才能进行测量。制造所需的成本和时间会导致设计周期过长,费用昂贵。
XFdtd提供了对这些问题进行建模的精确而高效的方法。它为工程师提供了对车辆数量和类型以及周围环境条件的完全控制。在 XF 中设计天线或阵列时,可使用相同的应用程序无缝过渡到现场测试,并在制造前对实际运行情况进行评估,从而形成更稳健的设计流程。
本示例考虑的是在公路交通条件下,在干燥路面上运行的 IVC 系统。如图 1 所示,两辆客车占据高速公路右侧车道,左侧是一辆大型牵引拖车。安装在后车厢上的垂直单极调谐到 5.9 GHz,用作 IVC 发射器。初步模拟捕捉了三辆车与路面之间的场相互作用,以确定将来进行更复杂实验的可行性。
我们的示例从建造汽车下方的道路开始。图 1 中 12 米长的公路是使用 XF 易于使用但功能强大的 CAD 建模工具建造的。通过简单的在线搜索,我们找到了涵盖各种汽车品牌和型号的 CAD 文件。XF 支持多种 CAD 格式,因此很容易找到兼容文件进行导入;此外,内置的材料库已经包含了这项工作所需的大部分材料。图 2 显示了从已安装的材料库中添加到项目中的几种材料。通过利用现有的 CAD 和材料库,工程师可以减少生成模型或搜索材料属性的时间,从而缩短项目设置时间。
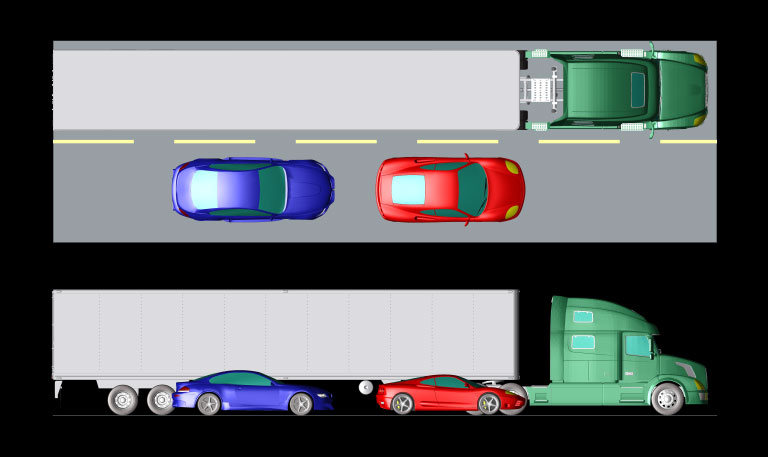
图 1:在路基上设置两辆客车和一辆牵引拖车。
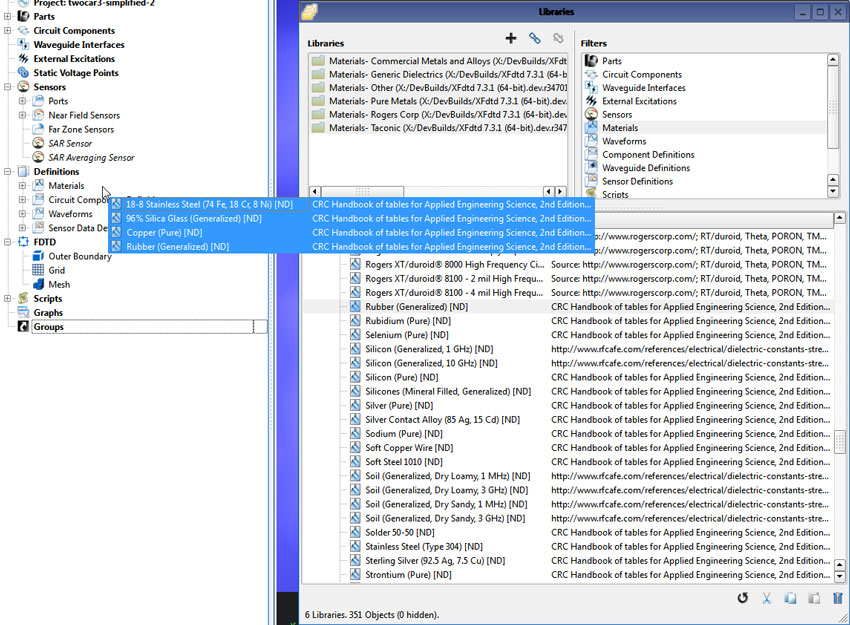
图 2:为 XF 项目添加材料。
每辆车都使用可参数化的工作坐标系放置在路面上。这样,以后就可以根据相对于其他车辆的位置,对系统性能进行实验。视频 1 演示了参数扫描如何修改车辆位置。在此示例中,位置设置为两车之间相距约 1.5 米。
这项工作考虑了几个潜在的安装位置,包括前保险杠、车顶和后备箱。XF 中的 "定位器 "功能允许用户快速切换天线位置,以方便天线安装调查。视频 2 演示了定位器的使用。最终,视频末尾显示的常用前保险杠位置成为我们示例中的安装点。
问题空间的总体积为 3.6x106 λ3,网格化后的单元数超过 37 亿,需要近 120GB 内存来模拟。不久前,如此大的电气空间还无法使用全波求解器;然而,Remcom 的 MPI + XStream和大内存支持使 XF 能够轻松解决这个问题。该模拟使用英伟达 PSG 集群上的 24 个 M2090 GPU 在大约 22 分钟内完成,时间由英伟达公司提供。
图 3 和图 4 显示了通过两辆汽车中心的平面切片在 5.9 GHz 时的稳态电场。结果范围从红色显示的 -20 dB 到黑色显示的 -100 dB。图 5 显示了在发射器高度保存的场数据平面切片的自上而下视图,图 6 显示了两辆汽车之间场相互作用的近距离视图。其余各图展示了从不同角度观察的相同数据。
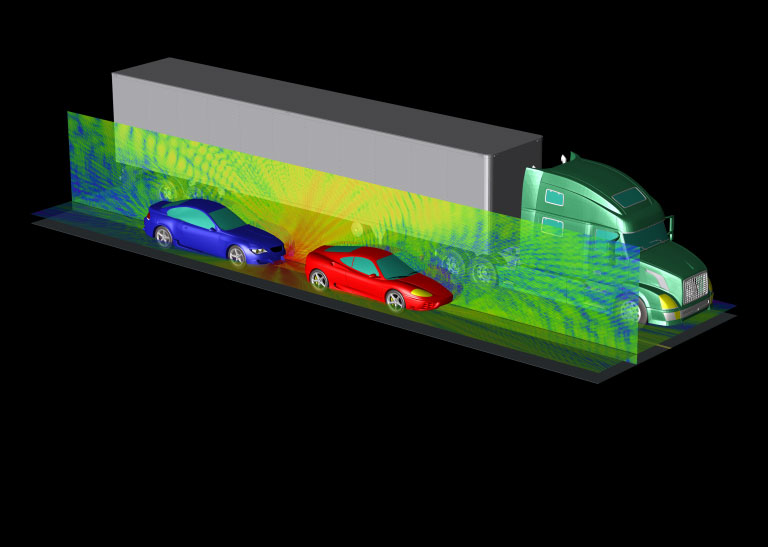
图 3:5.9 千兆赫时靠近发射器的稳态电场结果。

图 4:包含发射器的垂直面上的稳态电场结果。
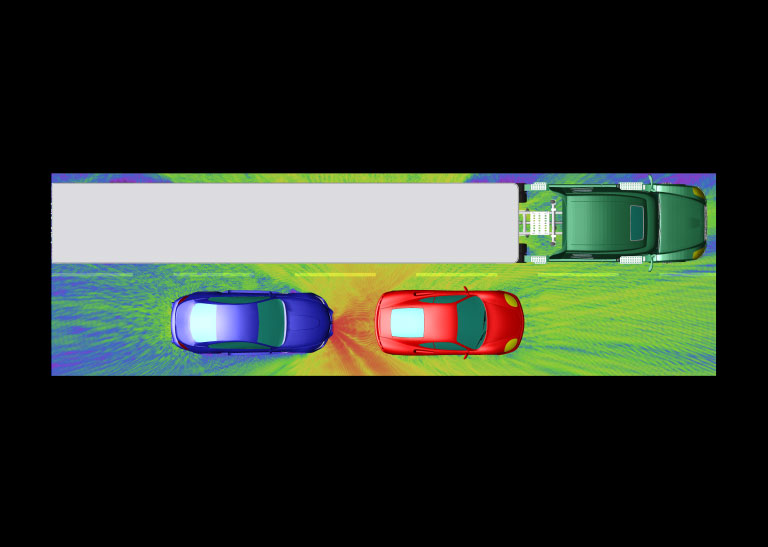
图 5:5.9 千兆赫稳态电场的俯视图。
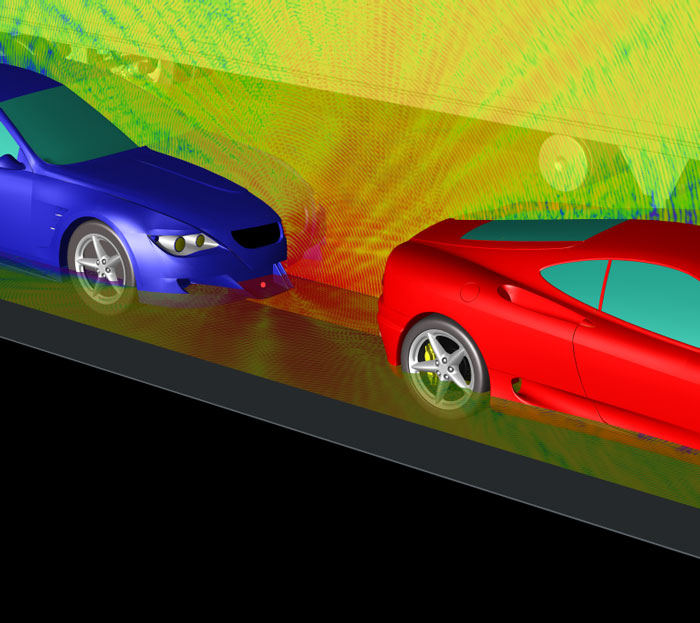
图 6:5.9 千兆赫时靠近发射器(红点)的稳态电场结果。
随着概念验证工作的完成,我们现在可以开展进一步的研究。未来的工作将研究车辆位置对通信链路的影响。我们还可以考虑天线位置和车辆材料构成的影响。还可以对环境变量进行建模,例如比较干燥路面和潮湿路面的性能,或在城市峡谷而非高速公路上的性能。结合 MPI + XStream GPU 加速,设计工程师就有能力全面描述和理解这一复杂问题。


